|
Publications (* denotes equal contribution)
|
|
|
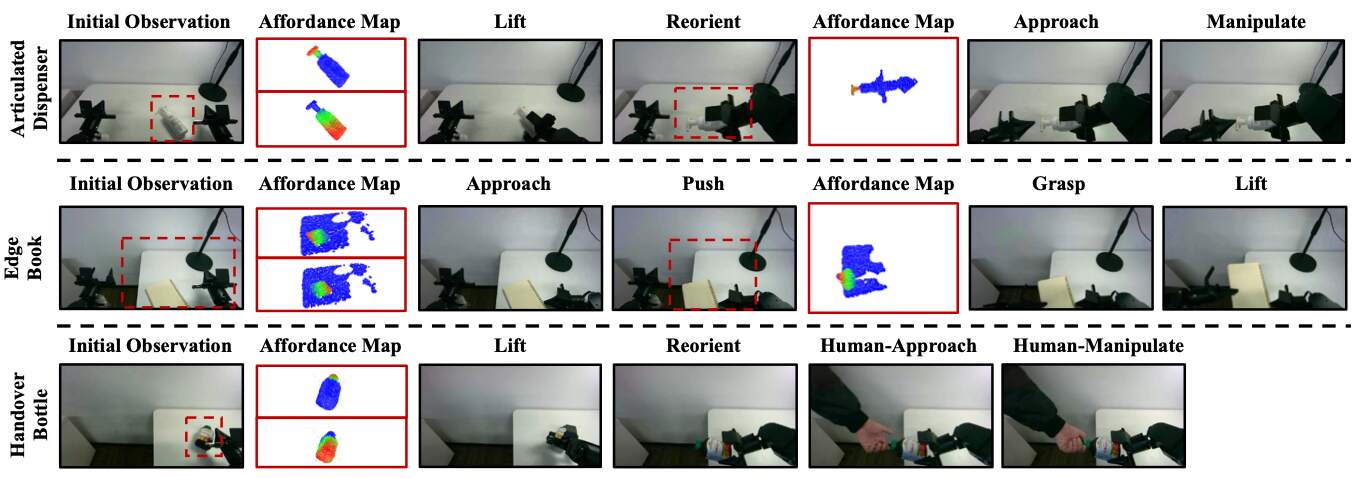
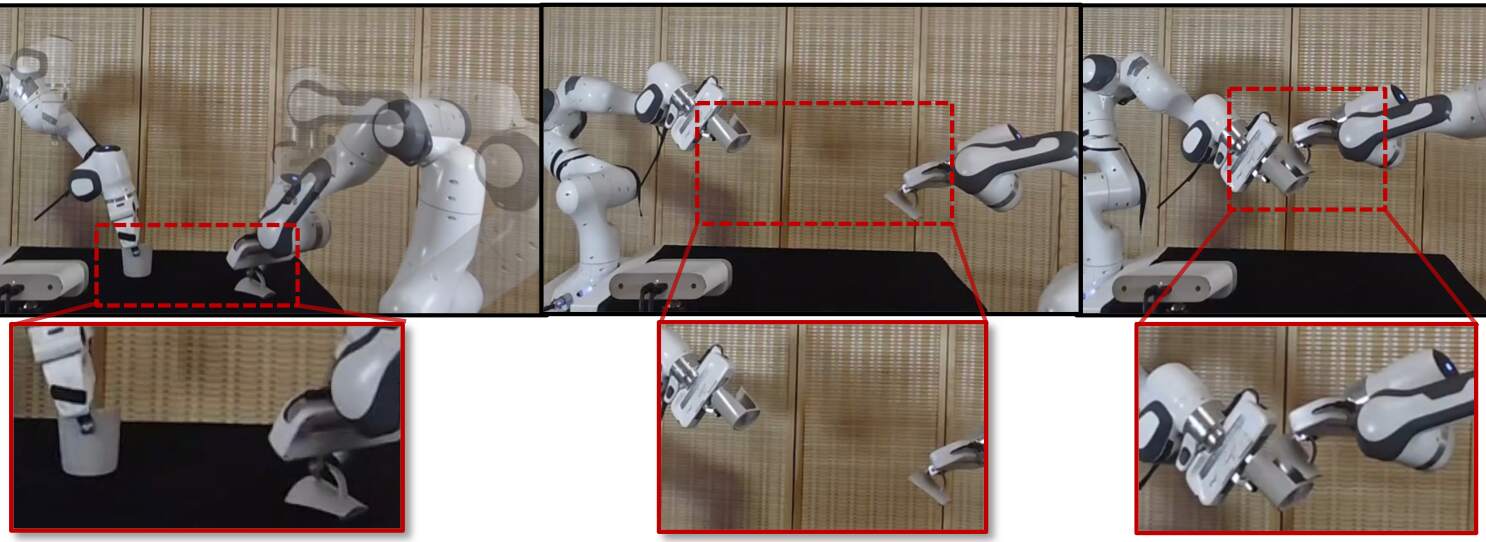
BiPreManip: Learning Affordance-Based Bimanual Pre-Manipulation through Anticipatory
Collaboration
Yan Shen,
Feng Jiang,
Zichen He,
Xiaoqi Li,
Yuchen Liu,
Zhiyu Li,
Ruihai Wu,
Hao Dong
CVPR 2026 (Highlight)
project page
/
paper
/
code
|
|
|
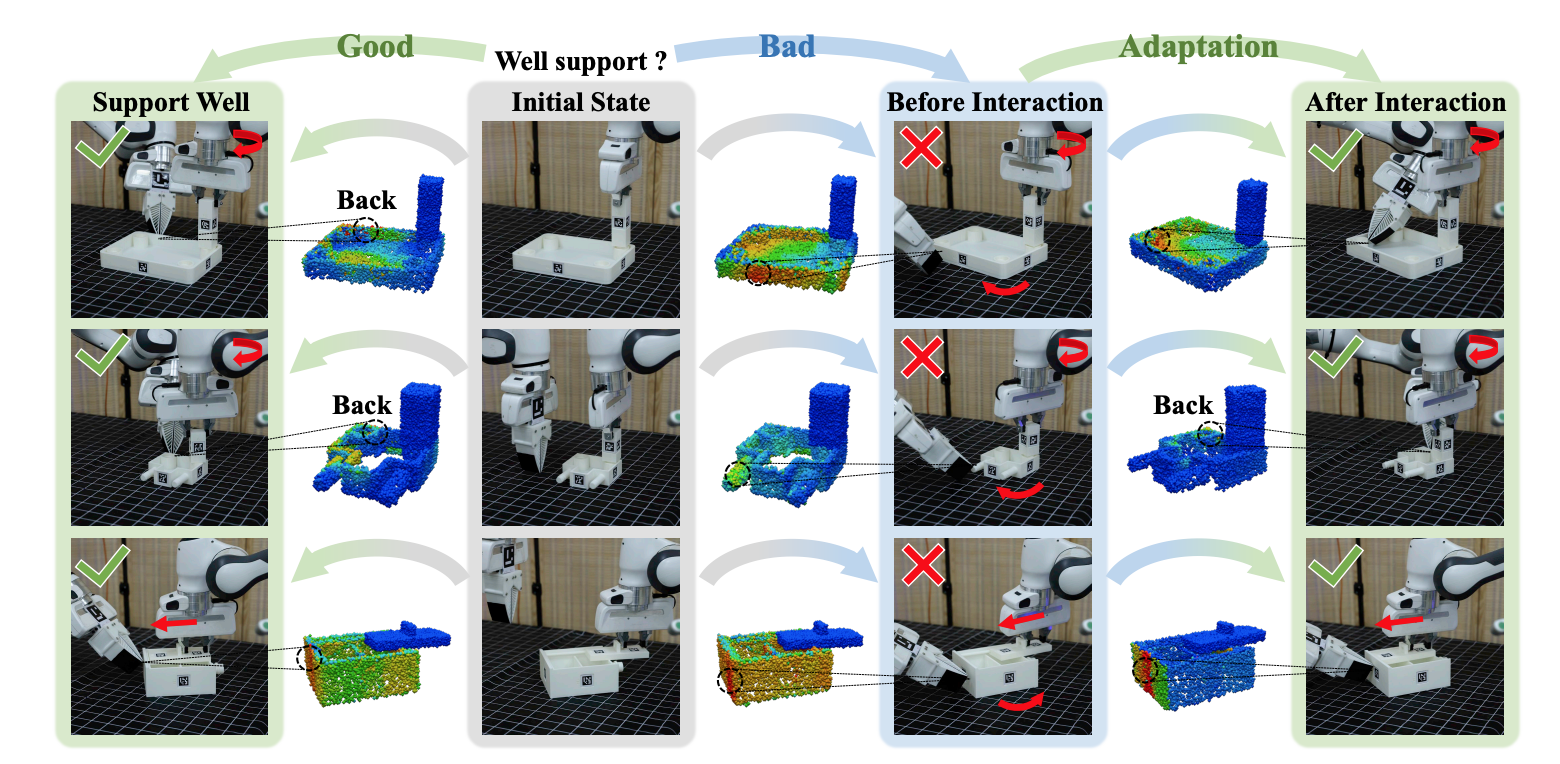
A3D: Adaptive Affordance Assembly with Dual-Arm Manipulation
Jiaqi Liang*,
Yue Chen*,
Qize Yu*,
Yan Shen,
Haipeng Zhang,
Hao Dong,
Ruihai Wu
AAAI 2026 (Oral)
paper
/
code
|
|
|
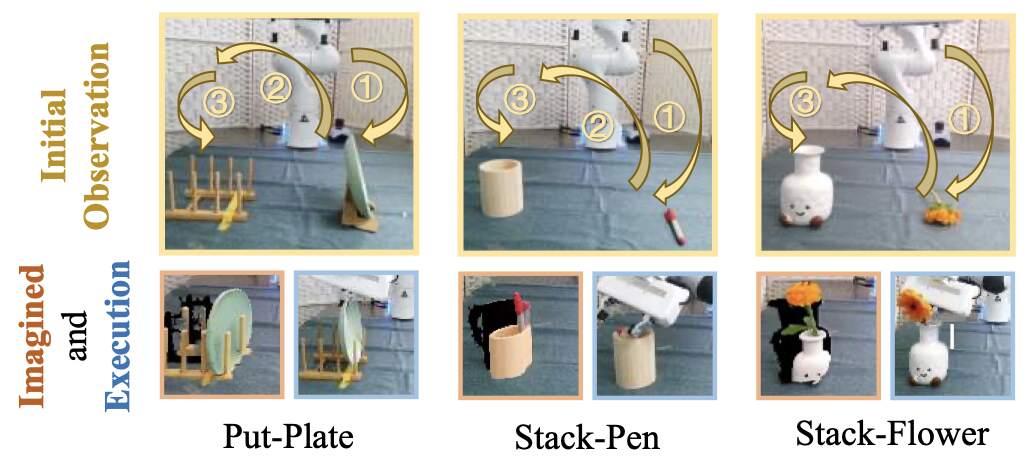
Imagine2Act: Leveraging Object-Action Motion Consistency from Imagined Goals for Robotic
Manipulation
Liang Heng*,
Jiadong Xu*,
Yiwen Wang*,
Xiaoqi Li*,
Muhe Cai,
Yan Shen,
Juan Zhu,
Guanghui Ren,
Hao Dong
ICRA 2026
project page
/
paper
/
code
|
|
|
BiAssemble: Learning Collaborative Affordance for Bimanual Geometric Assembly
Yan Shen*,
Ruihai Wu*,
Yubin Ke,
Xinyuan Song,
Zeyi Li,
Xiaoqi Li,
Hongwei Fan,
Haoran Lu,
Hao Dong
ICML 2025
Distinguished Workshop Paper Award at IROS 2025 Workshop on Frontiers in Dynamic, Intelligent, and
Adaptive Multi-arm Manipulation
project page
/
paper
/
code
|
|
|
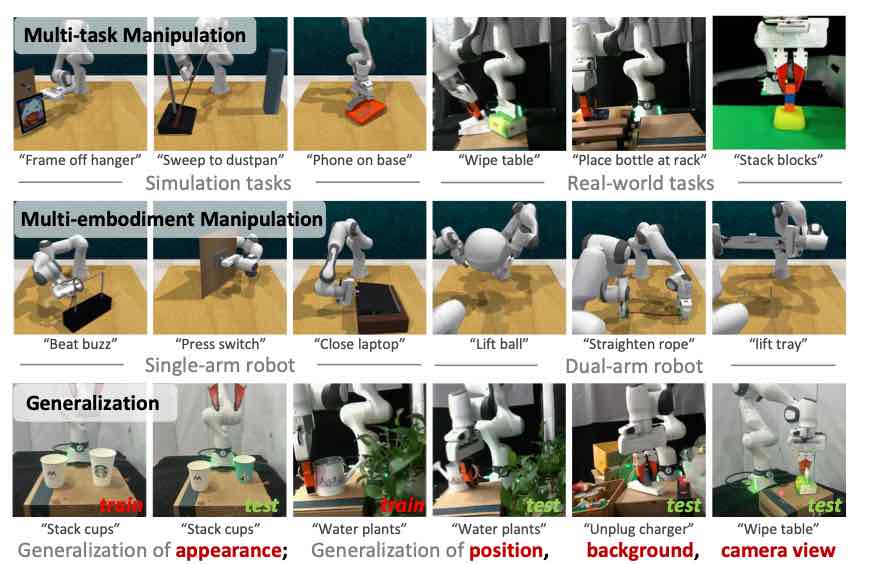
3DS-VLA: A 3D Spatial-Aware Vision Language Action Model for Robust Multi-Task
Manipulation
Xiaoqi Li,
Liang Heng,
Jiaming Liu,
Yan Shen,
Chenyang Gu,
Zhuoyang Liu,
Hao Chen,
Nuowei Han,
Renrui Zhang,
Hao Tang,
Shanghang Zhang,
Hao Dong
CoRL 2025
paper
/
code
|
|
|
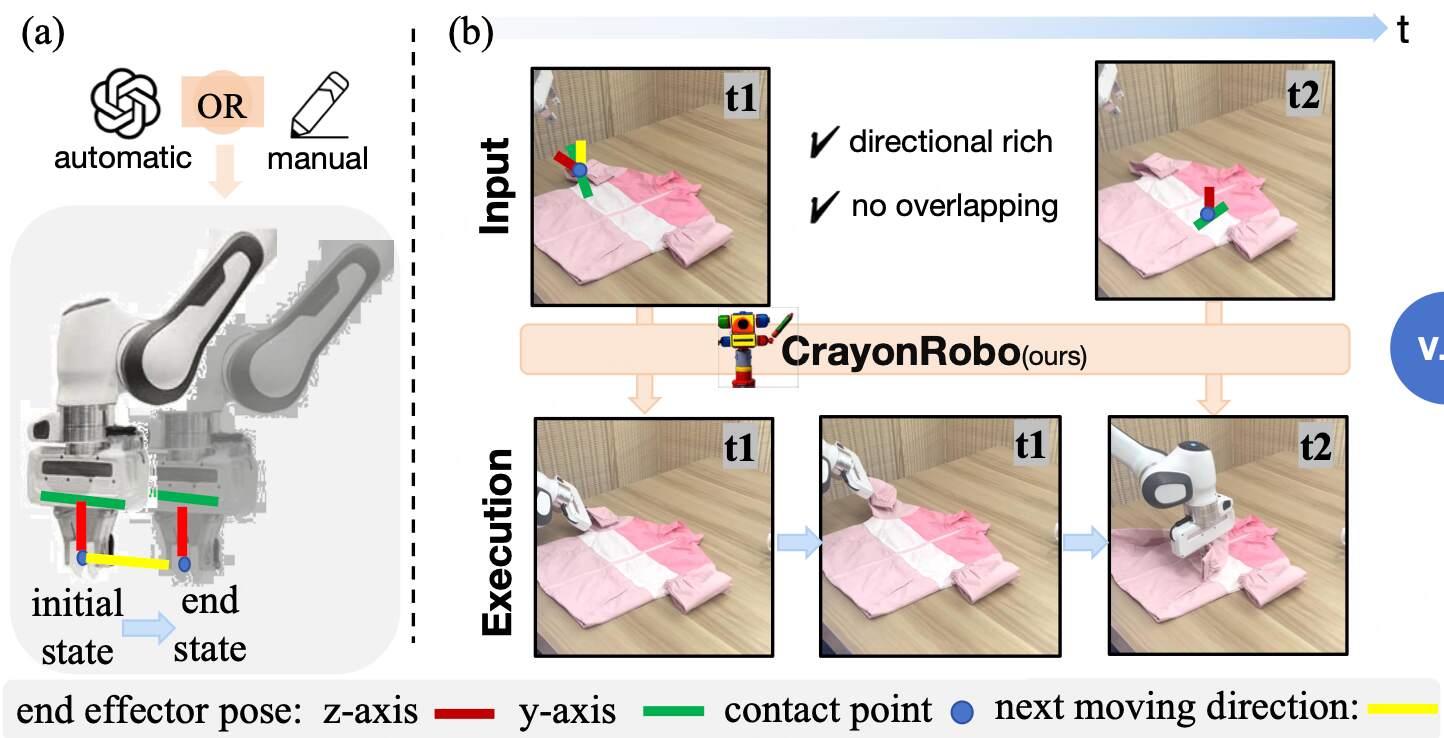
CrayonRobo: Object-Centric Prompt-Driven Vision-Language-Action Model for Robotic
Manipulation
Xiaoqi Li,
Lingyun Xu,
Mingxu Zhang,
Jiaming Liu,
Yan Shen,
Iaroslav Ponomarenko,
Jiahui Xu,
Liang Heng,
Siyuan Huang,
Shanghang Zhang,
Hao Dong
CVPR 2025
project page
/
paper
/
code
|
|
|
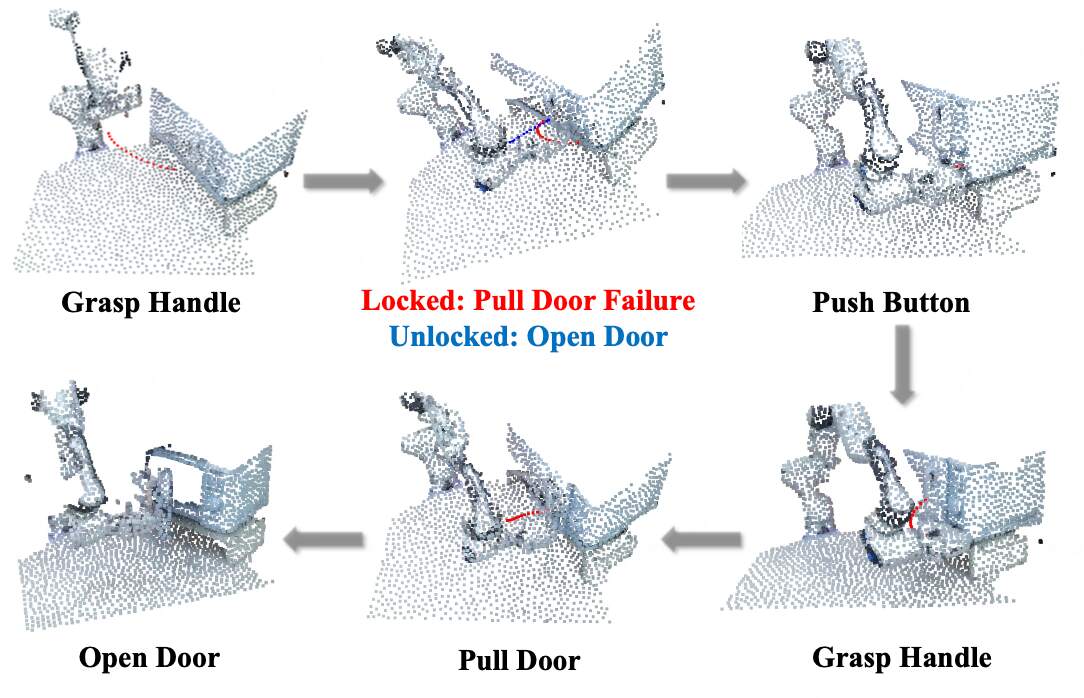
AdaManip: Adaptive Articulated Object Manipulation Environments and Policy Learning
Yuanfei Wang*,
Xiaojie Zhang*,
Ruihai Wu*,
Yu Li,
Yan Shen,
Mingdong Wu,
Zhaofeng He,
Yizhou Wang,
Hao Dong
ICLR 2025
project page
/
paper
/
code
|
|
|
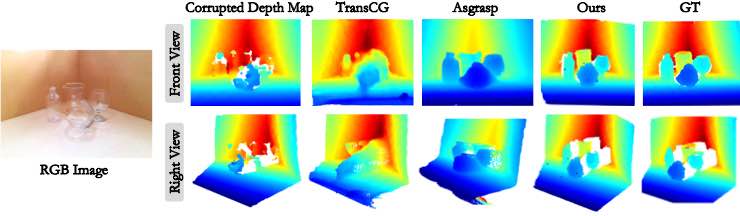
SR3D: Unleashing Single-view 3D Reconstruction for Transparent and Specular Object
Grasping
Mingxu Zhang*,
Xiaoqi Li*,
Jiahui Xu,
Kaichen Zhou,
Hojin Bae,
Yan Shen,
Chuyan Xiong,
Jiaming Liu,
Hao Dong
IROS 2025
paper
/
code (coming soon)
|
|
|
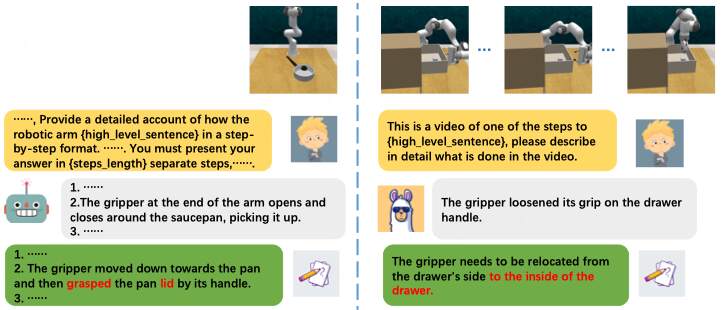
NaturalVLM: Leveraging Fine-grained Natural Language for Affordance-Guided Visual
Manipulation
Ran Xu*,
Yan Shen*,
Xiaoqi Li,
Ruihai Wu,
Hao Dong
RA-L 2024
project page
/
paper
/
code
|
|
|
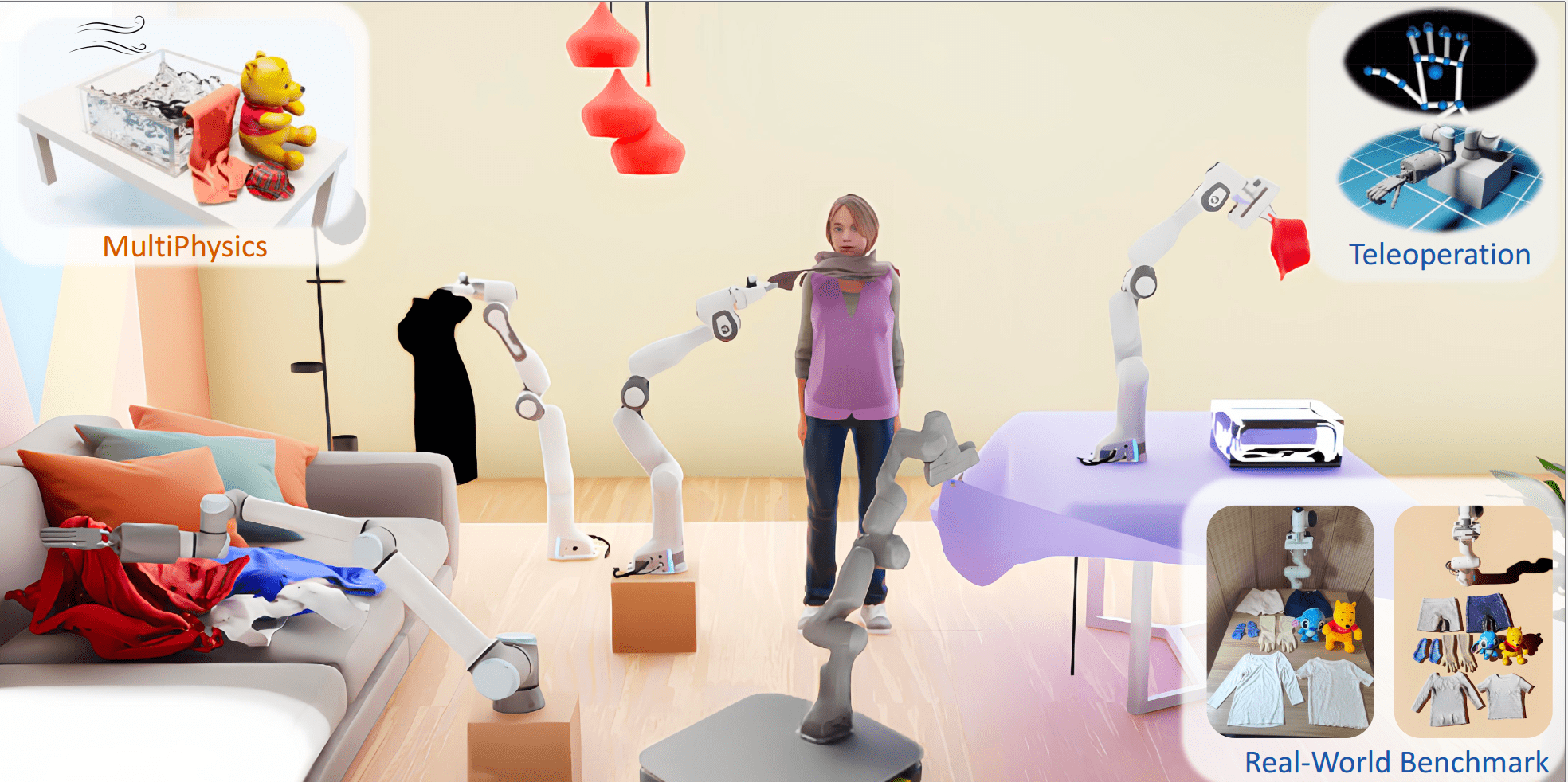
GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation
Haoran Lu*,
Ruihai Wu*,
Yitong Li*,
Sijie Li,
Ziyu Zhu*,
Chuanruo Ning,
Yan Shen,
Longzan Luo,
Yuanpei Chen,
Hao Dong
NeurIPS 2024
Spotlight Presentation at ICRA 2024 Workshop on Deformable Object Manipulation
project page
/
paper
/
code
|
|
|
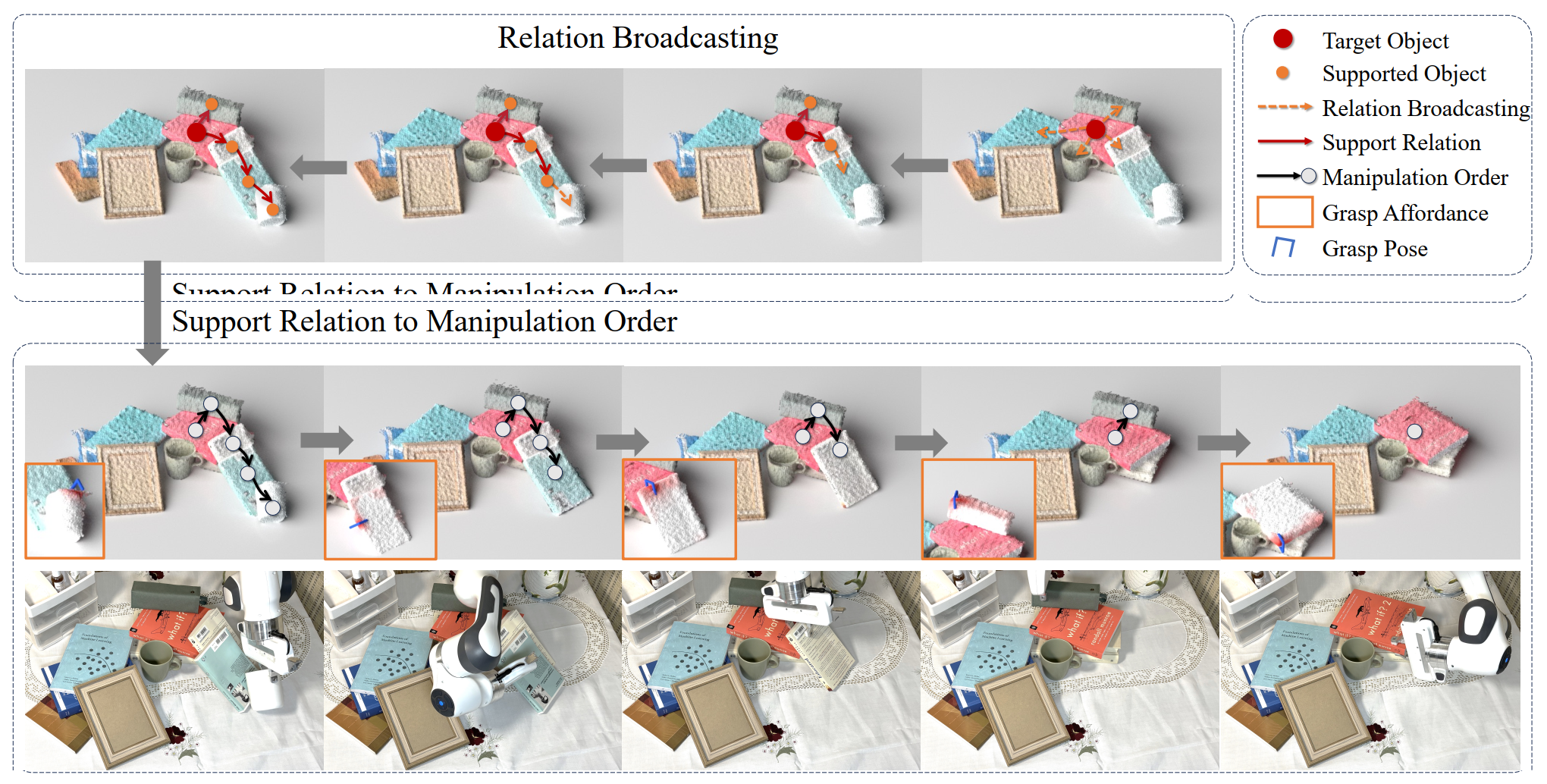
Broadcasting Support Relations Recursively from Local Dynamics for Object Retrieval in
Clutters
Yitong Li*,
Ruihai Wu*,
Haoran Lu,
Chuanruo Ning,
Yan Shen,
Guanqi Zhan,
Hao Dong
RSS 2024
Best Poster Award at PKU AI Tech Day 2024
project page
/
paper
/
code
|
|
|
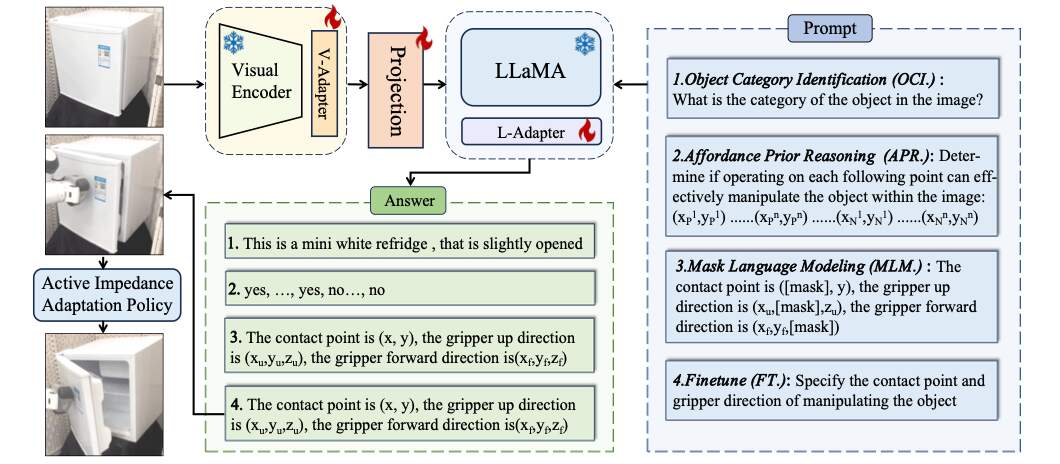
ManipLLM: Embodied Multimodal Large Language Model for Object-Centric Robotic
Manipulation
Xiaoqi Li*,
Mingxu Zhang,
Yiran Geng,
Haoran Geng,
Yuxing Long,
Yan Shen,
Renrui Zhang,
Jiaming Liu,
Hao Dong
CVPR 2024
project page
/
paper
/
code
|
|
|
Learning Environment-Aware Affordance for 3D Articulated Object Manipulation under
Occlusions
Ruihai Wu*,
Kai Cheng*,
Yan Shen,
Chuanruo Ning,
Guanqi Zhan,
Hao Dong
NeurIPS 2023
project page
/
paper
/
code
/
video
|
|
|
Leveraging SE(3) Equivariance for Learning 3D Geometric Shape Assembly
Ruihai Wu*,
Chenrui Tie*,
Yushi Du*,
Yan Shen,
Hao Dong
ICCV 2023
project page
/
paper
/
code
/
video
|
|
|
DualAfford: Learning Collaborative Visual Affordance for Dual-gripper Object
Manipulation
Yan Zhao*,
Ruihai Wu*,
Zhehuan Chen,
Yourong Zhang,
Qingnan Fan,
Kaichun Mo,
Hao Dong
ICLR 2023
project page
/
paper
/
code
/
video
|
|
|
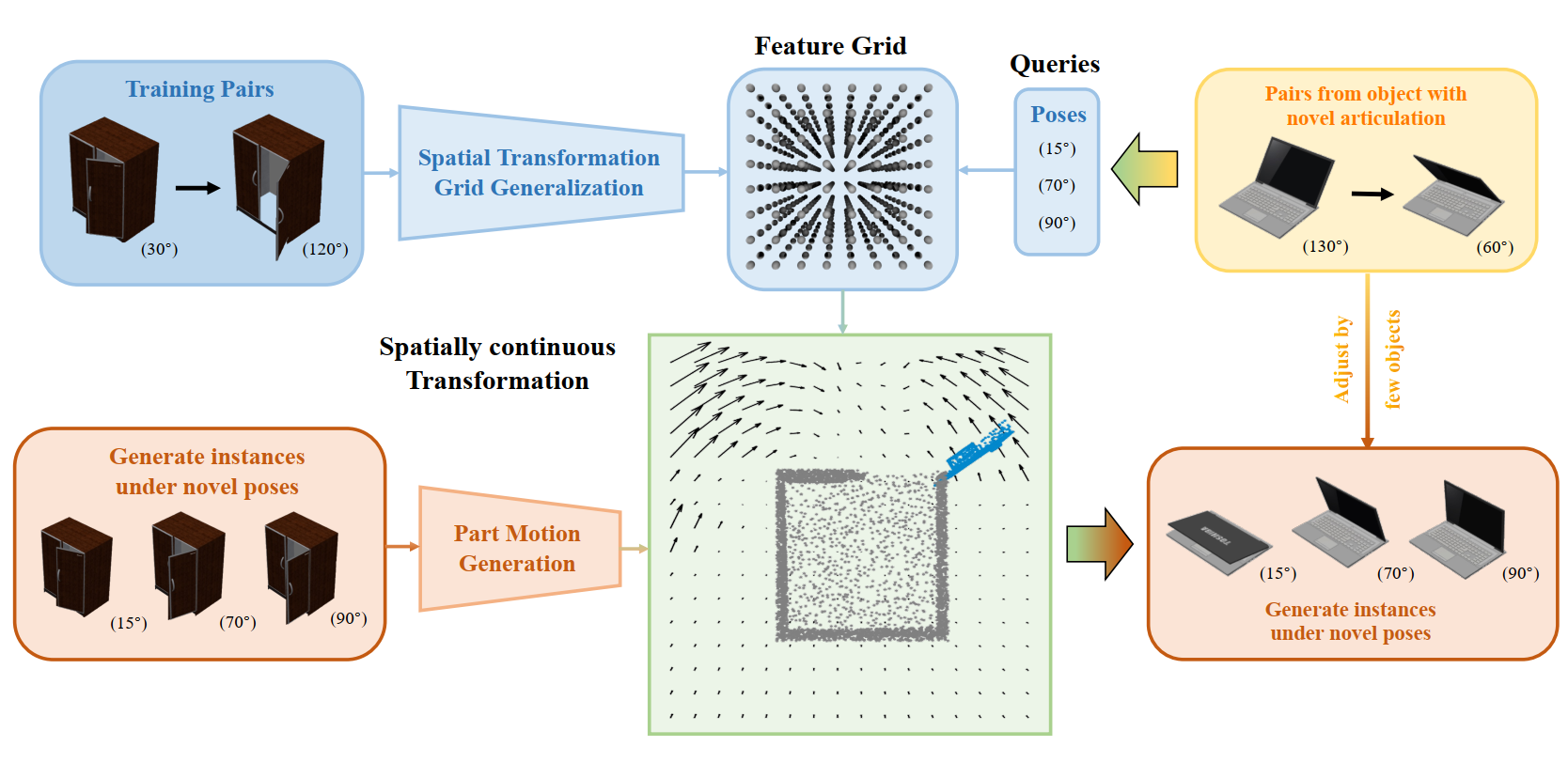
Learning Part Motion of Articulated Objects Using Spatially Continuous Neural Implicit
Representations
Yushi Du*,
Ruihai Wu*,
Yan Shen,
Hao Dong
BMVC 2023
project page
/
paper
/
code
/
|
|
|
VAT-Mart: Learning Visual Action Trajectory Proposals for Manipulating 3D ARTiculated
Objects
Ruihai Wu*,
Yan Zhao*,
Kaichun Mo*,
Zizheng Guo,
Yuanfei Wang,
Tianhao Wu,
Qingnan Fan,
Xuelin Chen,
Leonidas J. Guibas,
Hao Dong
ICLR 2022
project page
/
paper
/
code
/
video
|
Reviewer: CVPR 2026, ICRA 2026, ICML 2025, CVPR 2025, ICLR 2025, NeurIPS 2024, ECCV 2024, CVPR 2023
|
Shortlist (top40 among AI papers from 2022-2025), Youth Outstanding Paper Award of World AI Conference
(WAIC), China, 2025
Research Excellence Award, Peking University, 2025
Outstanding Reviewer, CVPR, 2023
First Prize in Undergraduate Scientific Research (5 in Yuanpei College), Peking
University, 2022
Outstanding Undergraduate Thesis, CFCS, Peking University, 2022
Freshmen Scholarship, Peking University, 2018
|
|